Particle Swarm Optimization Based Mobile Robot Navigation with Robot Operating System
Keywords:
PSO, LiDAR, SLAM, robot, obstaclesAbstract
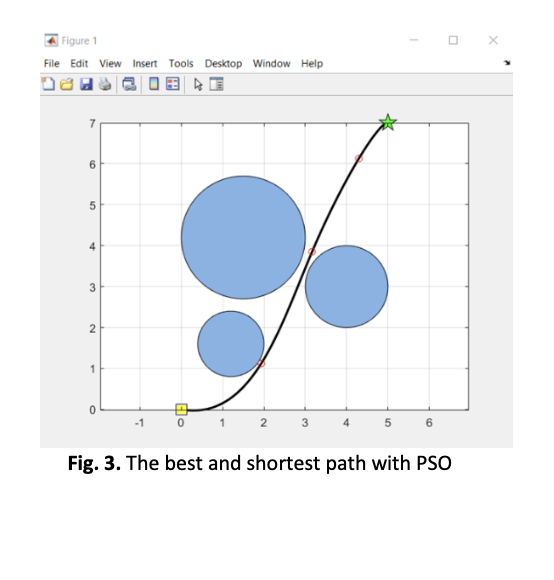
This research aims to develop mobile robot-based navigation with PSO. The system will be based on ROS environment to identify the PSO performance in mobile robot navigation. Further analysis on the mobile robot navigation with PSO is discussed in the literature review section of this paper. The aim for this paper is for the mobile robot to solve the path planning problem of mobile. The basic robot’s navigation of a robot requires many data or resources to process the output path of the navigation. To achieve this, LiDAR sensor is used to map the environment using SLAM functionality that is available on the mobile robot. A distance sensor will also be used for the mobile robot to avoid obstacles during the navigation process. However, it is found out that errors in terms of the sensor measurement may occur between the computer and real time performance. Thus, PSO is used to overcome this problem. To implement the PSO to the robot, basic research and review need to be done. All the results of this project had been collected in figures in the result section, including the differences before and after PSO implementation to the system. Further analysis and discussion were made on the system’s performance.